Mind the map! Accounting for existing map information when estimating online HDMaps from sensor data
Abstract
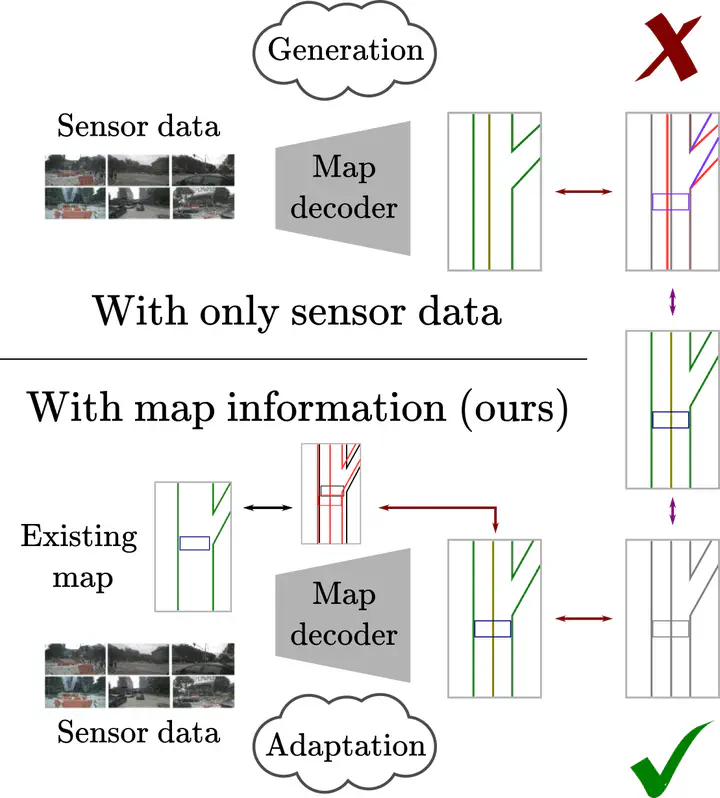
Online High Definition Map (HDMap) estimation from sensors offers a low-cost alternative to manually acquired HDMaps. As such, it promises to lighten costs for already HDMap-reliant Autonomous Driving systems, and potentially even spread their use to new systems. In this paper, we propose to improve online HDMap estimation by accounting for already existing maps. We identify 3 reasonable types of useful existing maps (minimalist, noisy, and outdated). We also introduce MapEX, a novel online HDMap estimation framework that accounts for existing maps. MapEX achieves this by encoding map elements into query tokens and by refining the matching algorithm used to train classic query based map estimation models. We demonstrate that MapEX brings significant improvements on the nuScenes dataset. For instance, MapEX - given noisy maps - improves by 38% over the MapTRv2 detector it is based on and by 16% over the current SOTA.
The work in this paper was extended in a preprint: “Reconciling feature sharing and multiple predictions with MIMO Vision Transformers”
Remy Sun
Research scientist
I am a research scientist (ISFP) at Inria Sophia Antipolis (MAASAI) team working on the injection of knowledge in neural networks.